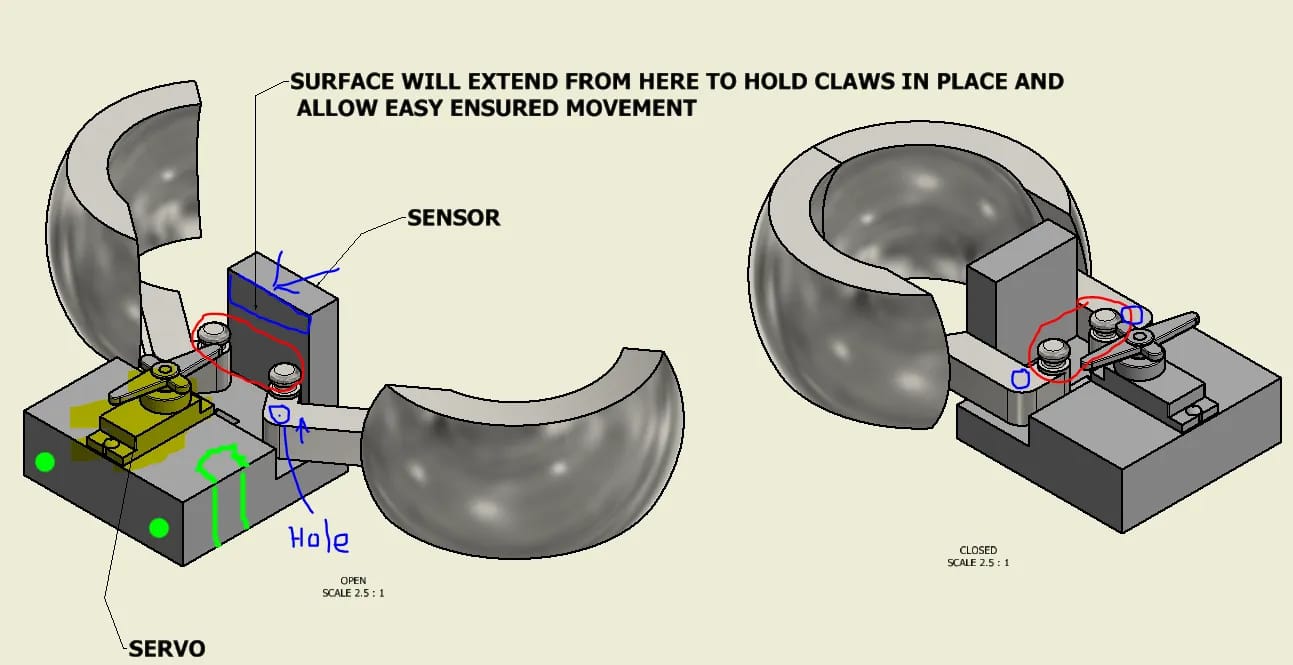
During my second year of university, I wanted to get involved in projects. I started with an Aerospace PhD student who was working on implementing a manipulator onto a drone to handle payloads. I was tasked with making a gripper that could hold a round object but was activated by a time of flight sensor, to allow for autonomous motion while performing a task.
I 3D printed the gripper and progressed through various iterations and arrived at a design that suited the desired criteria. This project required me to design and derive a solution to a problem while presenting my work which entailed all the technical drawings of the designs for future fabrication.